One Dimensional Example: Inversion/Assimilation & OED#
[2]:
# Import simulation model, observation oeprator, error (prior and observation noise) model, and DA
from pyoed.models.simulation_models.toy_linear import ToyLinearTimeDependent
from pyoed.models.observation_operators.identity import Identity
from pyoed.models.error_models.Gaussian import GaussianErrorModel
from pyoed.assimilation.smoothing.fourDVar import VanillaFourDVar
Assimilation (Bayesian Inversion)#
Create the inverser problem#
[3]:
# Create the simulation model
model = ToyLinearTimeDependent(configs={'nx':5, 'dt':0.1, 'random_seed':123})
print(f"Model array:\n{model.get_model_array()}")
# Create observation operator
obs_oper = Identity(configs={'model':model})
# Create prior and observation error model
prior = GaussianErrorModel(configs={'size':model.state_size, 'mean':0, 'variance':1, 'random_seed':1})
obs_noise = GaussianErrorModel(configs={'size':obs_oper.shape[0], 'variance':0.001, 'random_seed':1})
# Inverse Problem 4DVar DA object, and register its elements
inverse_problem = VanillaFourDVar()
inverse_problem.register_model(model)
inverse_problem.register_observation_operator(obs_oper)
inverse_problem.register_prior_model(prior)
inverse_problem.register_observation_error_model(obs_noise)
Model array:
[[-0.99 -0.37 1.29 0.19 0.92]
[ 0.58 -0.64 0.54 -0.32 -0.32]
[ 0.1 -1.53 1.19 -0.67 1. ]
[ 0.14 1.53 -0.66 -0.31 0.34]
[-2.21 0.83 1.54 1.13 0.75]]
Create and register synthetic obserations/Data#
[4]:
# Set the assimilation/simulation time window
tspan = (0, 0.3)
inverse_problem.register_assimilation_window(tspan)
# Create truth (true initial state and trajectory)
true_IC = model.create_initial_condition()
print(true_IC)
checkpoints = [0.1, 0.2, 0.3]
_, true_traject = model.integrate_state(true_IC, tspan=tspan, checkpoints=checkpoints)
# Create synthetic data (perturbation to truth) and register them
for t, state in zip(checkpoints, true_traject):
obs = obs_noise.add_noise(obs_oper(state))
inverse_problem.register_observation(t=t, observation=obs)
[-0.36176687 -1.2302322 1.22622929 -2.17204389 -0.37014735]
Solve the inverse problem#
[5]:
# Solve the inverse problem (retrieve the truth)
inverse_problem.solve_inverse_problem(init_guess=prior.mean.copy(), update_posterior=True)
[5]:
array([-0.11039567, -1.20251881, 1.27913471, -1.86907931, -0.20786296])
[6]:
# Statistics
from pyoed import utility
prior_rmse = utility.calculate_rmse(true_IC, inverse_problem.prior.mean)
posterior_rmse = utility.calculate_rmse(true_IC, inverse_problem.posterior.mean)
print(f"Prior RMSE: {prior_rmse}")
print(f"Posterrior RMSE: {posterior_rmse}")
Prior RMSE: 1.2651299147925466
Posterrior RMSE: 0.1922905370290526
[7]:
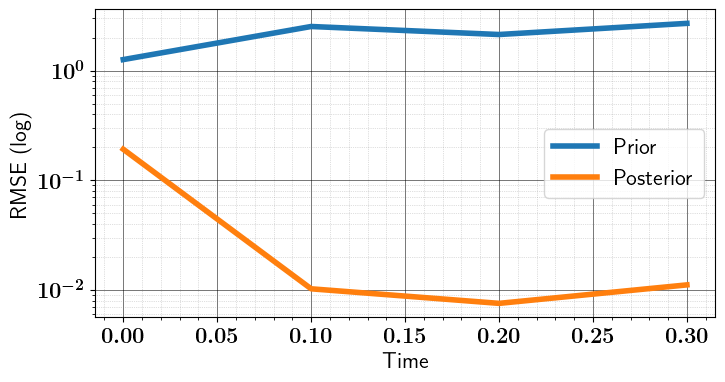
# Calculate prior and posterior trajectory and evaluate RMSE
checkpoints, true_traject = model.integrate_state(true_IC, tspan=tspan)
_, prior_traject = model.integrate_state(inverse_problem.prior.mean, tspan=tspan)
_, posterior_traject = model.integrate_state(inverse_problem.posterior.mean, tspan=tspan)
prior_rmse = [utility.calculate_rmse(xp, xt) for xp, xt in zip(prior_traject, true_traject)]
posterior_rmse = [utility.calculate_rmse(xp, xt) for xp, xt in zip(posterior_traject, true_traject)]
[8]:
import matplotlib.pyplot as plt
utility.plots_enhancer(usetex=True, fontsize=16)
# Plot RMSE (for prior and posterior/analysis)
fig = plt.figure(figsize=(8, 4))
ax = fig.add_subplot(111)
_ = ax.plot(checkpoints, prior_rmse, '-', lw=4, label='Prior')
_ = ax.plot(checkpoints, posterior_rmse, '-', lw=4, label='Posterior')
ax.set_yscale('log')
ax.set_xlabel("Time")
ax.set_ylabel("RMSE (log)")
ax.legend(loc='best')
utility.show_axis_grids(ax)
fig.savefig("ToyLinear4DVar_RMSE.pdf", dpi=600, bbox_inches='tight', transparent=True)
[9]:
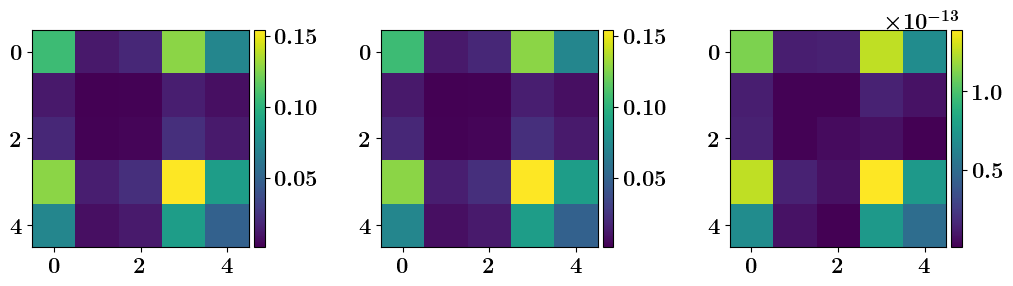
# IP posterrior covariance matrix
import numpy as np
post_cov = inverse_problem.posterior.covariance_matrix()
# Exact (from R, B, F)
F = model.get_model_array()
Rinv = obs_noise.precision_matrix()
Binv = prior.precision_matrix()
A = np.zeros_like(Binv)
for i in range(1, 4):
M = np.linalg.matrix_power(F, i)
A += np.dot(M.T, np.dot(Rinv, M))
A = np.linalg.inv(Binv + A)
Aerr = np.abs(post_cov - A) # Error/mismatch
# Plot
from mpl_toolkits.axes_grid1 import make_axes_locatable
fig, axes = plt.subplots(1, 3, figsize=(12, 12))
im = axes[0].imshow(post_cov)
divider = make_axes_locatable(axes[0])
cax = divider.append_axes("right", size="5%", pad=0.05)
fig.colorbar(im, orientation='vertical', cax=cax)
im = axes[1].imshow(A)
divider = make_axes_locatable(axes[1])
cax = divider.append_axes("right", size="5%", pad=0.05)
fig.colorbar(im, orientation='vertical', cax=cax)
im = axes[2].imshow(Aerr)
divider = make_axes_locatable(axes[2])
cax = divider.append_axes("right", size="5%", pad=0.05)
fig.colorbar(im, orientation='vertical', cax=cax)
# Adjust space between subplots
plt.subplots_adjust(wspace=1.25, hspace=0.25,)
plt.subplots_adjust(wspace=0.50, hspace=0.25,)
fig.savefig("ToyLinear4DVar_PostCov.pdf", dpi=600, bbox_inches='tight', transparent=True)
[10]:
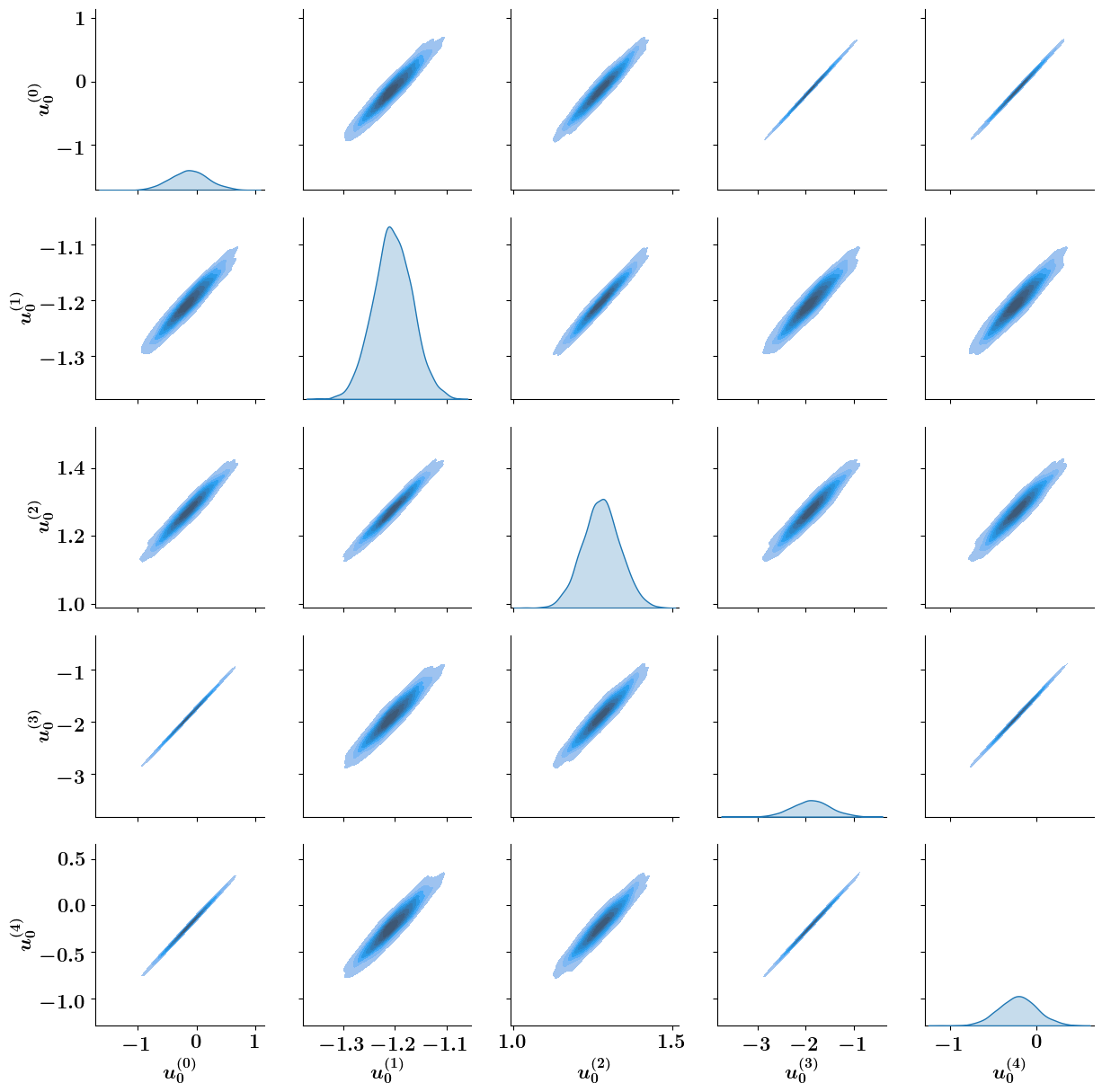
import seaborn as sns
import pandas as pd
N_samples = 2000
samples = pd.DataFrame(
[inverse_problem.posterior.sample() for _ in range(N_samples)],
columns=[r"$u_0^{(%d)}$"%i for i in range(5)]
)
g = sns.PairGrid(samples)
g = g.map_diag(sns.kdeplot, fill = True, common_norm=True)
g = g.map_offdiag(sns.kdeplot, fill = True)
g.savefig("ToyLinear4DVar_PairPlot.pdf", dpi=600, bbox_inches='tight', transparent=True)
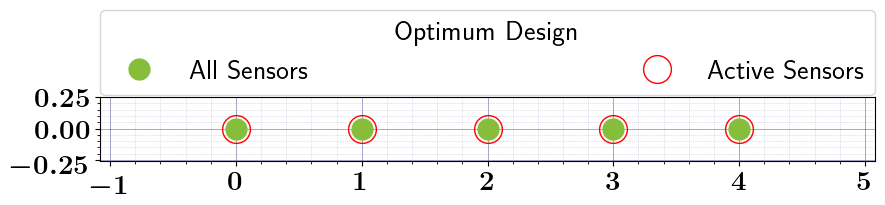
Optimal Experimental Design (OED)#
Standard Relaxed OED#
[11]:
from pyoed.oed.sensor_placement.relaxed_oed import SensorPlacementRelaxedOED
relaxed_oed_problem = SensorPlacementRelaxedOED(
configs=dict(
inverse_problem=inverse_problem,
formulation_approach="pre-post-precision-multiplication",
criterion='A-opt',
use_FIM=True,
)
)
relaxed_oed_results = relaxed_oed_problem.solve_oed_problem()
relaxed_oed_results.plot_results(keep_plots=True, overwrite=True)
/Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/oed/utility_functions/sensor_placement/a_opt.py:823: UserWarning: The formulation approach is `pre-post-precision-multiplication` which does not construct a pointwise weighting kernel. Returning `None`!
warnings.warn(
/Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/oed/sensor_placement/relaxed_oed.py:945: OptimizeWarning: Unknown solver options: verbose
res = sp_optimize.minimize(
***
Plotting Relaxed OED Results...
***
Saving/Plotting Results to: /Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/Optimization_Iterations.pdf
Plot saved to: '/Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/optimal_design.pdf'
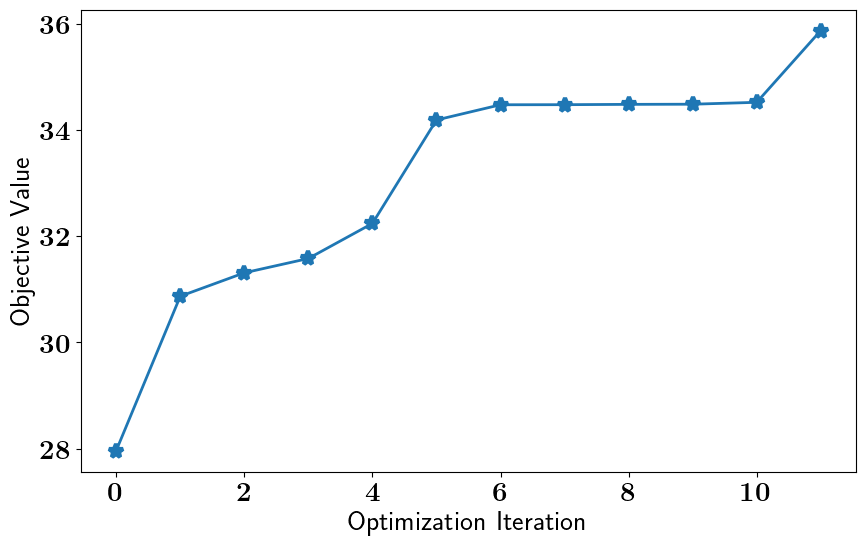
Pointwise Weighted Relaxed OED#
[12]:
from pyoed.oed.sensor_placement.relaxed_oed import SensorPlacementPointwiseRelaxedOED
pointwise_relaxed_oed_problem = SensorPlacementPointwiseRelaxedOED(
configs=dict(
inverse_problem=inverse_problem,
criterion='D-opt',
use_FIM=True
)
)
[13]:
budget = 2
penalty_f_l2 = lambda design: np.power(np.sum(design)-budget, 2)
penalty_f_l2_grad = lambda design: 2 * (np.sum(design)-budget) * np.ones_like(design)
pointwise_relaxed_oed_problem.register_penalty_term(
penalty_weight=-20,
penalty_function=penalty_f_l2,
penalty_function_gradient=penalty_f_l2_grad,
)
[14]:
pointwise_relaxed_oed_results = pointwise_relaxed_oed_problem.solve_oed_problem()
pointwise_relaxed_oed_results.plot_results(keep_plots=True, overwrite=True, )
/Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/oed/sensor_placement/relaxed_oed.py:945: OptimizeWarning: Unknown solver options: verbose
res = sp_optimize.minimize(
***
Plotting Relaxed OED Results...
***
Saving/Plotting Results to: /Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/Optimization_Iterations.pdf
Plot saved to: '/Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/optimal_design.pdf'
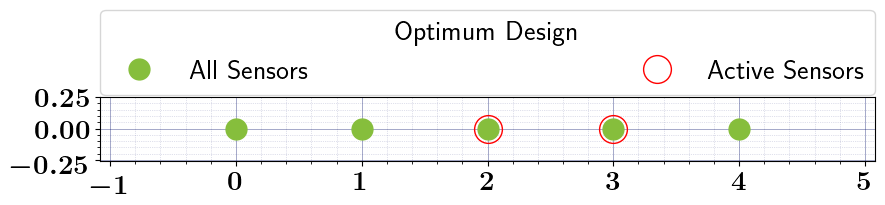
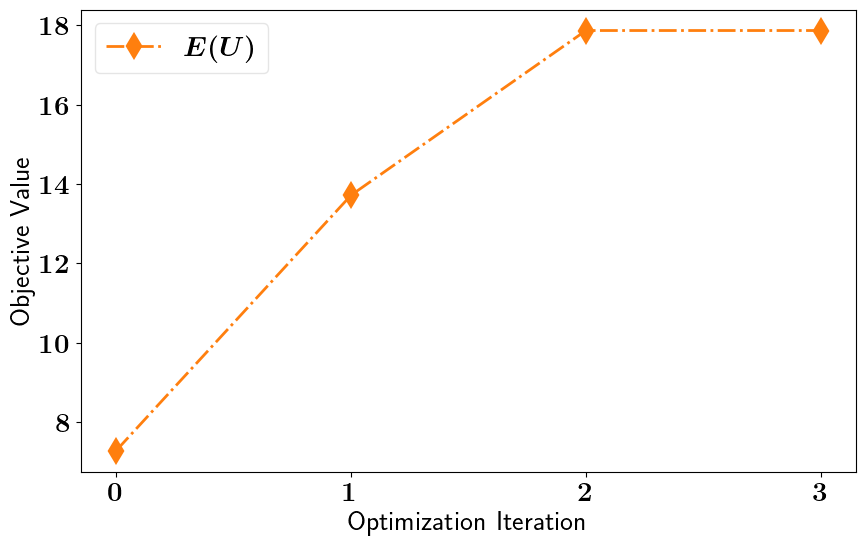
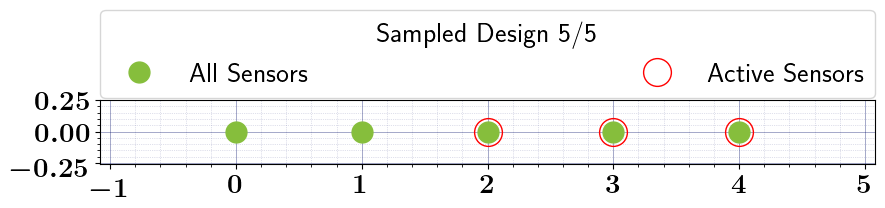
Stochastic Binary OED#
[15]:
from pyoed.oed.sensor_placement.binary_oed import SensorPlacementBinaryOED
stochastic_oed_problem = SensorPlacementBinaryOED(
configs=dict(
inverse_problem=inverse_problem,
criterion='D-opt',
use_FIM=True,
optimization_settings=dict(
def_stepsize=7.5e-2,
random_seed=1011,
max_iter=100,
)
)
)
# Add a penalty term
budget = 2
# penalty_f_l2 = lambda design: abs(np.count_nonzero(design)-budget)
penalty_f_l2 = lambda design: np.power(np.sum(design)-budget, 2)
stochastic_oed_problem.register_penalty_term(
penalty_weight=-20,
penalty_function=penalty_f_l2,
)
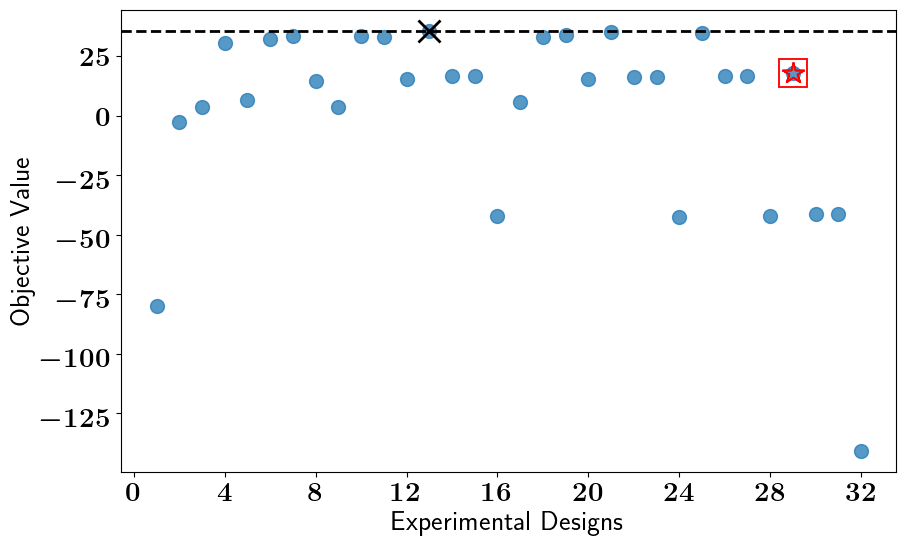
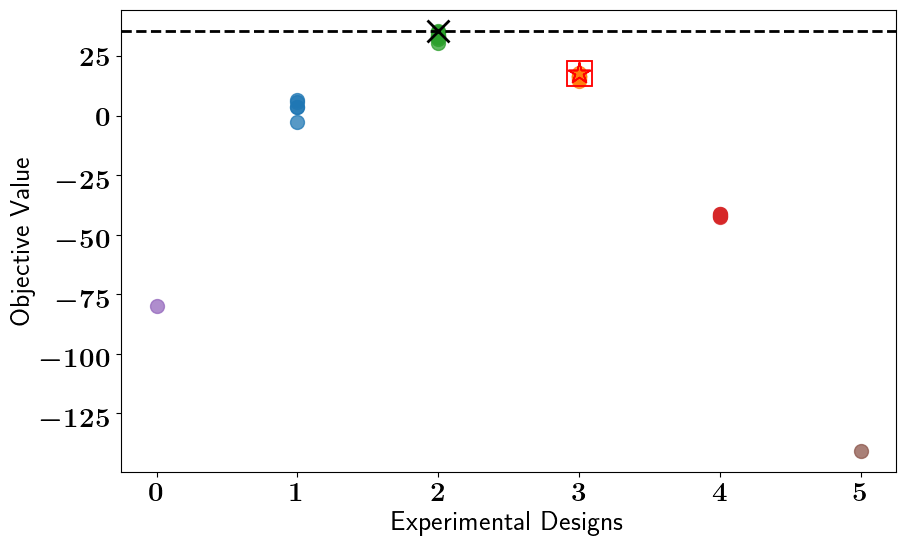
# Solve the OED problem, Run Bruteforce search, and plot results
stochastic_oed_results = stochastic_oed_problem.solve_oed_problem()
stochastic_oed_results.update_bruteforce_results()
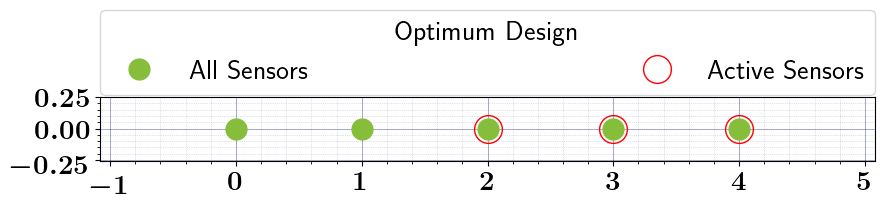
stochastic_oed_results.plot_results(overwrite=True, keep_plots=True, )
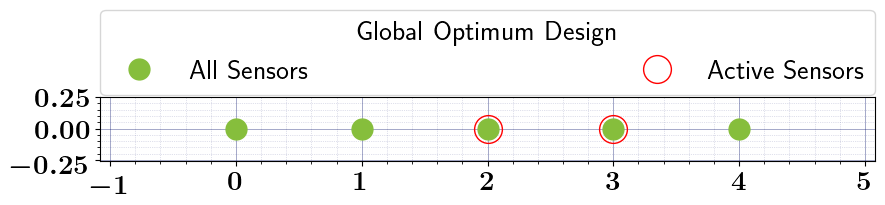
print(stochastic_oed_results.optimal_design)
print(stochastic_oed_results.optimal_policy_parameter)
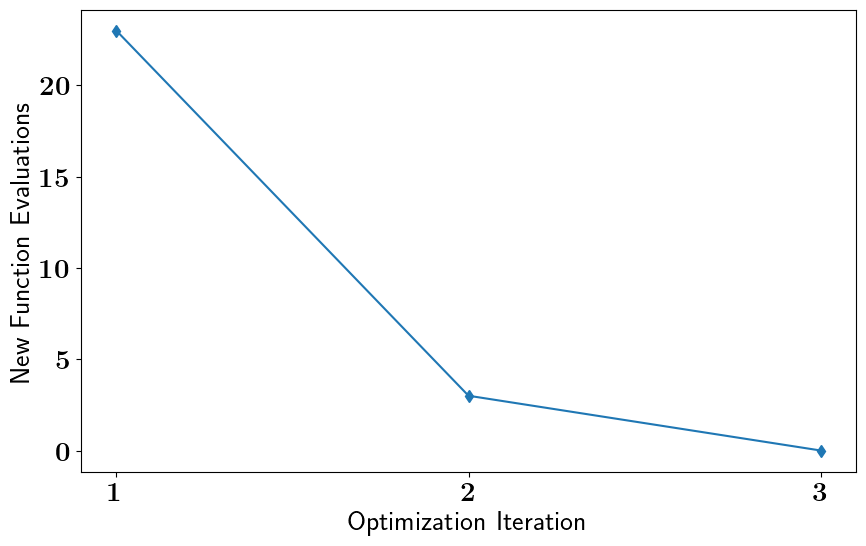
REINFORCE Iteration: 1 ; Step-Update-Norm: 0.9733778004395454
REINFORCE Iteration: 2 ; Step-Update-Norm: 1.2132377472865148
REINFORCE Iteration: 3 ; Step-Update-Norm: 0.0
***
Plotting Binary/Stochastic OED Results...
***
Saving/Plotting Results to: /Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/Optimization_Iterations.pdf
Saving/Plotting Results to: /Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/BruteForce_ScatterPlot.pdf
Saving/Plotting Results to: /Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/Clustered_BruteForce_ScatterPlot.pdf
Plot saved to: '/Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/global_optimum_design.pdf'
Plot saved to: '/Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/optimal_design.pdf'
Plot saved to: '/Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/optimum_design_sample1.pdf'
Plot saved to: '/Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/optimum_design_sample2.pdf'
Plot saved to: '/Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/optimum_design_sample3.pdf'
Plot saved to: '/Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/optimum_design_sample4.pdf'
Plot saved to: '/Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/optimum_design_sample5.pdf'
Saving/Plotting Results to: /Users/attia/AHMED_HOME/Research/Projects/Software/PyOED/Branches/32-update-oed-interface-to-conform-to-the-unified-configs-arguments/pyoed/pyoed/examples/tutorials/Optimization_Iterations_FunctionEvaluations.pdf
[False False True True True]
[0. 0. 1. 1. 1.]
[ ]: