#include "moab/Core.hpp"#include "moab/CartVect.hpp"#include "moab/OrientedBox.hpp"#include "moab/OrientedBoxTreeTool.hpp"#include <cstdlib>#include <iostream>#include <cmath>#include <ctime>#include <csignal>#include <cassert> Include dependency graph for obb_time.cpp:
Include dependency graph for obb_time.cpp: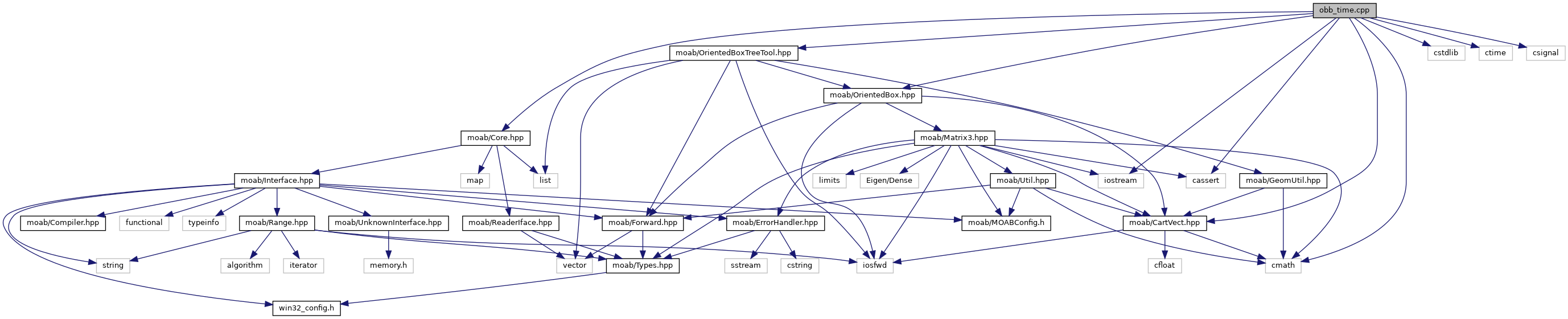
Go to the source code of this file.
Functions | |
| static void | usage () |
| void | generate_ray (const CartVect &sphere_center, double sphere_radius, CartVect &point, CartVect &dir) |
| ErrorCode | read_tree (Interface *instance, const char *filename, EntityHandle &tree_root_out) |
| void | signal_handler (int) |
| int | main (int argc, char *argv[]) |
Variables | |
| const int | NUM_RAYS = 40000 |
| const int | NUM_XSCT = 20000 |
| int | num_rays = NUM_RAYS |
| int | num_xsct = NUM_XSCT |
| const char * | filename = 0 |
| bool | do_sets = false |
| bool | do_trv_stats = false |
| int | rays = 0 |
| int | xsct = 0 |
| int | gen = 0 |
| clock_t | ttimer |
Function Documentation
◆ generate_ray()
| void generate_ray | ( | const CartVect & | sphere_center, |
| double | sphere_radius, | ||
| CartVect & | point, | ||
| CartVect & | dir | ||
| ) |
Definition at line 31 of file obb_time.cpp.
References moab::CartVect::normalize().
Referenced by main().
◆ main()
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 84 of file obb_time.cpp.
References moab::CartVect::array(), box(), moab::OrientedBoxTreeTool::box(), do_sets, do_trv_stats, ErrorCode, filename, gen, generate_ray(), iface, MB_SUCCESS, num_rays, num_xsct, moab::OrientedBoxTreeTool::TrvStats::print(), moab::OrientedBoxTreeTool::ray_intersect_sets(), moab::OrientedBoxTreeTool::ray_intersect_triangles(), rays, read_tree(), signal_handler(), ttimer, usage(), and xsct.
◆ read_tree()
| ErrorCode read_tree | ( | Interface * | instance, |
| const char * | filename, | ||
| EntityHandle & | tree_root_out | ||
| ) |
Definition at line 47 of file obb_time.cpp.
References ErrorCode, filename, moab::Interface::load_mesh(), MB_SUCCESS, MB_TYPE_HANDLE, moab::Interface::tag_get_data(), and moab::Interface::tag_get_handle().
Referenced by main().
◆ signal_handler()
| void signal_handler | ( | int | ) |
◆ usage()
|
static |
Definition at line 17 of file obb_time.cpp.
References NUM_RAYS, and NUM_XSCT.
Referenced by main().
Variable Documentation
◆ do_sets
| bool do_sets = false |
Definition at line 64 of file obb_time.cpp.
Referenced by main().
◆ do_trv_stats
| bool do_trv_stats = false |
Definition at line 65 of file obb_time.cpp.
Referenced by main().
◆ filename
| const char* filename = 0 |
Definition at line 63 of file obb_time.cpp.
Referenced by main(), read_tree(), and signal_handler().
◆ gen
| int gen = 0 |
Definition at line 68 of file obb_time.cpp.
Referenced by main(), and signal_handler().
◆ NUM_RAYS
| const int NUM_RAYS = 40000 |
Definition at line 12 of file obb_time.cpp.
Referenced by usage().
◆ num_rays
| int num_rays = NUM_RAYS |
Definition at line 61 of file obb_time.cpp.
Referenced by main(), and signal_handler().
◆ NUM_XSCT
| const int NUM_XSCT = 20000 |
Definition at line 13 of file obb_time.cpp.
Referenced by usage().
◆ num_xsct
| int num_xsct = NUM_XSCT |
Definition at line 62 of file obb_time.cpp.
Referenced by main(), and signal_handler().
◆ rays
| int rays = 0 |
Definition at line 68 of file obb_time.cpp.
Referenced by main(), and signal_handler().
◆ ttimer
| clock_t ttimer |
Definition at line 69 of file obb_time.cpp.
Referenced by main(), and signal_handler().
◆ xsct
| int xsct = 0 |
Definition at line 68 of file obb_time.cpp.
Referenced by main(), and signal_handler().
